Projects & Theses
Below you find a collection of BSc and MSc projects and theses that can be carried out within the MaP community.
Learning-Based Shape Estimation for Rigid Segment Based Continuum Robots

The Multi-Scale Robotics Lab develops novel actuation methods for endoscopic devices utilizing magnetic navigation systems (MNS). In MNS, an external magnetic field applies forces and torques on magnets attached to the endoscopes. To control these endoscopes, precise shape estimation techniques are required. Current methods try to estimate the endoscope’s shape by measuring the external field along the endoscope using hall-sensors. This method requires precise knowledge about the applied external field and often lacks in localization precision in certain directions.
Keywords
Estimation, Localization, Medical Robotics, FEM, ROS, Kalman Filter, Machine Learning
Labels
Master Thesis
Goal
Contact Details
More information
Published since: 2024-05-16 , Earliest start: 2024-06-01
Applications limited to ETH Zurich
Organization Multiscale Robotics Lab
Hosts Ehmke Claas , Boehler Quentin , Mesot Alexandre
Topics Engineering and Technology
Product Development in Industry

Bühler, a leading industry manufacturer in Uzwil, is partnering with ETH Zürich's Feasibility Lab to offer a unique master thesis opportunity. Throughout your thesis, you'll work hand-in-hand with a team of like-minded peers, following the principles of cross-functional teamwork and agile project planning. You can explore your interests in AI/Machine Learning, Robotics, UX, Additive Manufacturing, Food Science and more and actively define your own project scope.
Keywords
rapid prototyping, sustainability, industrial automation, mechanical design, mechanical engineering, automation, process design, robotics, machine learning, applied AI, food processing, advanced materials
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
The Project
Your Task
You have...
About pd|z
Facts
Contact Details
More information
Published since: 2024-05-16 , Earliest start: 2024-10-01 , Latest end: 2025-04-06
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , Zurich University of Applied Sciences
Organization pd|z Product Development Group Zurich
Hosts Gisler Daniel , Fox Stephan Cecil
Topics Engineering and Technology
Electromagnetic compatibility of electrophysiological recording systems

Electrophysiological recording systems, such as patch-clamp rigs and in-vitro neural interfaces, are designed to capture minute voltage signals (<100 µV) produced by electrogenic cells. These systems often comprise multiple instruments that face electromagnetic compatibility challenges, including ground loops and conflicting electric and magnetic fields. This project seeks to investigate the underlying causes of these issues and develop solutions to enhance the reliability and robustness of electrophysiological recordings.
Keywords
Electromagnetic compatibility, EMC, PCB design, electrophysiology, neural interface
Labels
Semester Project , Master Thesis
Description
Contact Details
More information
Published since: 2024-05-16 , Earliest start: 2024-06-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Engineering and Technology
Modeling and Simulation for Earthwork in Digital Twin

In this work, we aim to build a digital twin of our autonomous hydraulic excavator, leveraging Mathworks technology for high-fidelity modeling. This will be used in the future to test and benchmark our learning-based controllers.
Keywords
Modeling, Hydraulics, Excavation, Industry
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-05-15 , Earliest start: 2024-06-03
Organization Robotic Systems Lab
Hosts Spinelli Filippo , Nan Fang
Topics Information, Computing and Communication Sciences , Engineering and Technology
[Copy of] BSc or MSc Thesis, Research Project, Hilfsassiste

Diaxxo (diaxxo.com) is a start-up originated at ETH Zürich, where in the past 4 years we have developed and prototyped an innovative Point-of-Care Polymerase Chain Reaction (PCR) device. Our vision is to bring the power of molecular diagnostics to every doctor’s office, thanks to our new pre-loaded PCR test kits that allow for simpler and faster sample preparation steps. In 2020 our devices have been used by more than 250 laypeople for the rapid detection of COVID-19 in a field study that we run at ETH Zürich, and our systems are currently being tested at the Swiss Tropical and Public Health Institute (Swiss TPH).
Keywords
#POCT #RNA/DNAextraction #PCR #R&D #Sample-to-result #Design #biology #Experiments
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-05-14 , Earliest start: 2022-09-01 , Latest end: 2023-09-30
Organization Functional Materials Laboratory
Hosts Gregorini Michele
Topics Biology
BSc or MSc Thesis, Research Project, Hilfsassiste

Diaxxo (diaxxo.com) is a start-up originated at ETH Zürich, where in the past 4 years we have developed and prototyped an innovative Point-of-Care Polymerase Chain Reaction (PCR) device. Our vision is to bring the power of molecular diagnostics to every doctor’s office, thanks to our new pre-loaded PCR test kits that allow for simpler and faster sample preparation steps. In 2020 our devices have been used by more than 250 laypeople for the rapid detection of COVID-19 in a field study that we run at ETH Zürich, and our systems are currently being tested at the Swiss Tropical and Public Health Institute (Swiss TPH).
Keywords
#POCT #RNA/DNAextraction #PCR #R&D #Sample-to-result #firmware #Design #software #microcontroller #arduino #programming #computer science
Labels
Semester Project , Master Thesis , Student Assistant / HiWi
Description
Goal
Contact Details
More information
Published since: 2024-05-14 , Earliest start: 2022-09-19 , Latest end: 2023-06-01
Organization Functional Materials Laboratory
Hosts Gregorini Michele
Topics Engineering and Technology
Computational design optimization of a motion preserving spinal implant

Following trauma or due to degeneration it can be necessary to replace one or more intervertebral discs with an implant, a so-called Total Disc Replacement (TDR). Such devices enable motion though surfaces articulating against each other. While this treatment is clinically successful, it is connected to considerable complication and reoperation rates. Therefore, we are optimizing the design of such an implant to address these issues. While many different designs and design types have been proposed and are used in clinical practice, there is no consensus on what design or design type is the most beneficial. However, it is hypothesized, that replicating the situation that is present in healthy (asymptomatic) subjects as closely as possible, is optimal. Since the motions of the cervical spine are coupled (coupling of rotation and translation as well as multiple rotations) the optimal design of the articulating surfaces is not obvious. Therefore, this master’s thesis project aims at designing the implants articulating surfaces using parametric design optimization in LS-OPT based on finite element simulations.
Keywords
Computational, FEM, finite element method, simulation, mechanics, biomechanics, design, optimization
Labels
Master Thesis
Description
Contact Details
More information
Published since: 2024-05-14 , Earliest start: 2024-06-01 , Latest end: 2024-11-30
Organization Bone Pathologies and Treatment
Hosts Kölle Lucia
Topics Engineering and Technology
Microfabrication and characterization of microelectrodes for neural interfaces

The focus of this project is on the fabrication of microelectrodes for advanced neural interfaces in a cutting-edge cleanroom environment. Our research aims to develop high-resolution neural probes utilizing state-of-the-art microfabrication techniques.
Keywords
Microfabrication; Cleanroom; Neural Interfaces; Microelectrode Arrays; Biomedical Devices; Nanotechnology; Electrochemical Deposition; Neurotechnology; Semiconductor Processing; Bioengineering.
Labels
Semester Project , Master Thesis
Description
Contact Details
More information
Published since: 2024-05-14 , Earliest start: 2023-12-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Engineering and Technology
Design of low-noise amplifier for CMOS-based neural interfaces

This project focuses on the design of low-noise, low-power, compact amplifiers for next-generation neural interfaces.
Keywords
Microelectronics, VLSI, CMOS, LNA, electronics, analog integrated circuit design, neural interface.
Labels
Semester Project , Master Thesis
Description
Contact Details
More information
Published since: 2024-05-14 , Earliest start: 2024-07-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Engineering and Technology
Master Thesis at the Bühler Exploration Lab - be part of an agile engineering task force: find needs, build prototypes, create new products

Bühler, a leading industry manufacturer in Uzwil, is partnering with ETH Zürich's Feasibility Lab to offer a unique master thesis opportunity. Throughout your thesis, you'll work hand-in-hand with a team of like-minded peers, following the principles of cross-functional teamwork and agile project planning. You can explore your interests, be it in AI/Machine Learning, Robotics, UX, Additive Manufacturing or more and actively define your own project scope. More details are published in the link in the description
Keywords
Master Thesis Engineering
Labels
Semester Project , Internship , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-05-13 , Earliest start: 2024-09-01 , Latest end: 2025-04-30
Applications limited to EPFL - Ecole Polytechnique Fédérale de Lausanne , ETH Zurich , Zurich University of Applied Sciences
Organization pd|z Product Development Group Zurich
Hosts von Kai , Gisler Daniel , Fox Stephan Cecil
Topics Information, Computing and Communication Sciences , Engineering and Technology
Multimodal Fusion for Time-Series Representation Learning

Time-series data is increasingly prevalent across various domains, including finance, healthcare, and environmental monitoring. The ability to extract meaningful information from time-series data is crucial for prediction, classification, and anomaly detection. This project focuses on exploring different time-series representations and their impact on machine learning tasks.
Keywords
Time-Series Representation, Multimodal Learning, Anomaly Detection
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-05-13 , Earliest start: 2024-05-14
Organization Structural Mechanics (Prof. Chatzi)
Hosts Dong Hao
Topics Information, Computing and Communication Sciences
Master Thesis for Sustainable Product Development with a large Industrial partner

Drying (e.g. Pasta drying) is the most energy intensive process step, sometimes taking up more than 50% of the total energy consumption of a plant. Superheated steam drying could present an energy efficient alternative to classical hot-air drying systems used today. This new technology could have a massive impact on the carbon-footprint and sustainability of food-drying; making it a highly future-oriented and potentially impactful innovation.
Keywords
sustainability, process development, product development, interdisciplinary, validation and testing, food processing, rapid prototyping, drying technology, thermodynamics, industrial automation, CFD, mechanical design, mechanical engineering, automation, energy flow, process design, scale-up
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
The Project
Your Task
You have...
About pd|z
Facts
Contact Details
More information
Published since: 2024-05-13 , Earliest start: 2024-04-03 , Latest end: 2025-01-31
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , Zurich University of Applied Sciences
Organization pd|z Product Development Group Zurich
Hosts Gisler Daniel
Topics Engineering and Technology
Plant trellising using reinforcement learning

Modern agriculture yields significantly more crops in controlled environments, but this comes with a much larger labor demand to train plants on vertical structures. We want to automate this for tomato greenhouses. Check www.floatingrobotics.com
Keywords
Robotics, Reinforcement Learning, Bimanual manipulation, Soft object, Farming, Greenhouse
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-05-13 , Earliest start: 2024-05-15 , Latest end: 2025-02-28
Organization Robotic Systems Lab
Hosts Faraji Salman
Topics Information, Computing and Communication Sciences
Collision-free object reaching & grasping with a legged mobile manipulator

Reaching and grasping an object of interest is a relatively simple task that can be achieved robustly in case the object is equipped with a simple handle and a visual marker. However, often the difficulty in the task originates from the rest of the environment. The object may be placed in cluttered spaces with diverse obstacles as well as dynamic entities, e.g. humans, other robots. As a result, executing the task of reaching and grasping the object necessitates collision-free motion control capabilities.
Keywords
Mobile Manipulation, Loco-Manipulation, Reinforcement Learning, Robot Control, Legged Robotics
Labels
Semester Project , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-05-10
Organization Robotic Systems Lab
Hosts Klemm Victor
Topics Information, Computing and Communication Sciences , Engineering and Technology
MSc thesis: Techno-economic modelling of Li-ion battery recycling
This master thesis aims to establish a comprehensive baseline for the LIB recycling industry, evaluating CO2 emissions and associated costs. Based on literature reviews and expert interviews you can build techno-economic analyses and conduct life-cycle assessments using Python. These will inform the development of low-carbon scenarios to enhance the sustainability of battery technologies. Join our dynamic and interdisciplinary research group to contribute to critical advancements in environmental and economic aspects of LIB recycling.
Keywords
LIB, li-ion, battery, recycling, techno-economic, LCA, carbon footprint, technology forecasting, expert interviews
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-05-09 , Earliest start: 2024-05-10 , Latest end: 2025-01-31
Organization Materials and Device Engineering Group (Wood)
Hosts Peiseler Leopold
Topics Engineering and Technology , Commerce, Management, Tourism and Services , Policy and Political Science
Semester Project_Design customized molds for manufacturing a novel joint implant
Background: The Laboratory of Orthopedic Technology has recently developed a novel joint implant and is undergoing optimization of the manufacturing process. We are looking for a master's student who is passionate about medical devices and mechanical design to join us for a semester project. Objectives: • Design different molds for material casting using SolidWorks or Fusion 360. • Optimize implant using matlab or Python. • Utilize 3D printing or laser cutting to create the molds. • Conduct mechanical tests on the implants. Your Profile: • Strong knowledge in mechanical design and drawing skills. • Hands-on and detail-oriented. • Experience with SolidWorks or Fusion 360, as well as Python or Matlab. Timeframe: Starting ASAP until the end of September.
Labels
Semester Project , ETH Zurich (ETHZ)
Contact Details
More information
Published since: 2024-05-08 , Earliest start: 2024-05-13 , Latest end: 2024-09-30
Organization Bone Pathologies and Treatment
Hosts Du Xiaoyu
Topics Engineering and Technology
Implementation and Benchmarking of Memristor Crossbar Array Computations for Neuromorphic Systems

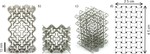
Memristors are tunable resistance elements that can be used as analog memory and for computation. Recently, they emerged as compelling technology for neuromorphic computing where they act as artificial synapses. Arranged in crossbar arrays (see Figures), these memristors form a grid that can efficiently processes information in parallel, analog to the neural network in the brain. One prominent example is vector-matrix multiplication, a central mathematical operation in machine learning/artificial intelligence. In memristor crossbar arrays this operation can be done very efficiently in a single step by simply applying a vector of voltages at the array and reading out the current. To profit from the advantages of this crossbar array arrangement, the goal of this thesis is to implement the progamming and readout of crossbar arrays as well as crossbar vector-matrix multiplications in our lab and to test your implementation on our fabricated arrays.
Keywords
memristors, coding, machine learning, artificial intelligence,
Labels
Semester Project , Bachelor Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-05-07 , Earliest start: 2024-05-01
Organization Nano-TCAD (Luisier)
Hosts Zellweger Till
Topics Information, Computing and Communication Sciences , Engineering and Technology
Development of Next Generation Sustainable Food Drying Technology

Drying (e.g. Pasta drying) is the most energy intensive process step, sometimes taking up more than 50% of the total energy consumption of a plant. Superheated steam drying could present an energy efficient alternative to classical hot-air drying systems used today. This new technology could have a massive impact on the carbon-footprint and sustainability of food-drying; making it a highly future-oriented and potentially impactful innovation.
Keywords
food processing, rapid prototyping, sustainability, drying technology, thermodynamics, industrial automation, CFD, mechanical design, mechanical engineering, automation, energy flow, process design
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
The Project
Your Task
You have...
About pd|z
Facts
Contact Details
More information
Published since: 2024-05-07 , Earliest start: 2024-04-03 , Latest end: 2025-01-31
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , Zurich University of Applied Sciences
Organization pd|z Product Development Group Zurich
Hosts Fox Stephan Cecil , Gisler Daniel
Topics Engineering and Technology
Soft materials with active transitions in mechanical properties

Active and adaptive materials show exciting, new dynamic functionalities that far exceed those of classically passive materials. To enable these new functionalities, we follow a bio-inspired approach based on biochemical processes at the single-cell level. Thanks to these biochemical processes, individual cells can fulfill surprisingly complex tasks such as computing time or finding nutrients. Our goal is to transfer such processes to responsive hydrogels, so that we can locally trigger a chemical wave that self-propagates through the entire material and induces changes in mechanical properties.
Keywords
active materials, soft materials, enzymes, mechanical properties
Labels
Bachelor Thesis , Master Thesis , Master Project (D-MATL)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-05-03 , Earliest start: 2024-05-02
Organization Complex Materials
Hosts Gray Natascha
Topics Engineering and Technology , Chemistry
Online Safe Locomotion Learning in the Wild
Reinforcement learning (RL) can potentially solve complex problems in a purely data-driven manner. Still, the state-of-the-art in applying RL in robotics, relies heavily on high-fidelity simulators. While learning in simulation allows to circumvent sample complexity challenges that are common in model-free RL, even slight distribution shift ("sim-to-real gap") between simulation and the real system can cause these algorithms to easily fail. Recent advances in model-based reinforcement learning have led to superior sample efficiency, enabling online learning without a simulator. Nonetheless, learning online cannot cause any damage and should adhere to safety requirements (for obvious reasons). The proposed project aims to demonstrate how existing safe model-based RL methods can be used to solve the foregoing challenges.
Keywords
safe mode-base RL, online learning, legged robotics
Labels
Master Thesis
Description
Contact Details
More information
Published since: 2024-05-03
Organization ETH Competence Center - ETH AI Center
Hosts Li Chenhao , Li Chenhao , Li Chenhao , Li Chenhao
Topics Engineering and Technology
Design, Control, and System Integration of a Robotic Platform for Autonomous Eye Injections

The objective of this project is to create a comprehensive robotic platform capable of autonomously administering injections into the human eye. The project includes mechanical design, motion planning, and the implementation of a force control algorithm.
Keywords
Mechanical design, motion planning, feedback control, system integration, computer vision (basics)
Labels
Semester Project , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-05-03 , Earliest start: 2024-05-06
Organization Multiscale Robotics Lab
Hosts Ehmke Claas
Topics Engineering and Technology
Development of an Electro-adhesion Skin for a Humanoid Robotic Hand

Incorporating electro-adhesion pads on the artificial soft skin of a humanoid robotic hand to enhance its grasping ability in various scenarios.
Keywords
Electro-adhesion, Humanoid Robotic Hands, Soft Robotics, Mechatronic Design
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-05-01 , Earliest start: 2024-05-06 , Latest end: 2024-12-31
Applications limited to ETH Zurich
Organization Soft Robotics Lab
Hosts Gravert Stephan-Daniel , Hinchet Ronan , Katzschmann Robert, Prof. Dr.
Topics Engineering and Technology , Physics
Learning Robust Perceptive Locomotion for Humanoid Robots Over Challenging Terrains

Quadrupedal robots have demonstrated a great potential to play a significant role in various applications [1, 2], including operating autonomously in remote and hazardous environments, industrial surveillance, etc. Their kinematic structure, similar to that of quadrupedal animals, makes them highly adaptable to both natural landscapes and human-made environments. Over the past decade, significant progress has been made in developing robust quadrupedal locomotion. However, achieving successful bipedal locomotion remains a greater challenge. Humanoids exhibit more intricate dynamic and kinematic properties, including a smaller base of support, more DoFs, potential self collisions from arm swing, etc. In this project, based on the gaited network structure proposed in [2] for quadrupedal robots, we aim at adapting this approach to bipedal locomotion in simulation and on the real machine.
Keywords
Reinforcement Learning, Humanoid, Locomotion
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-30
Organization Robotic Systems Lab
Hosts He Junzhe
Topics Information, Computing and Communication Sciences , Engineering and Technology
Muscle Tissue Organoids with Integrated Sensing

You will obtain functional constructs of living muscle tissue that can be implemented into robots as bio-actuators. The tissue will be realized via bioprinting or conventional biofabrication in 3D designs at the mm-to-cm scale. The deformation of the constructs will be achieved via electrical stimulation of contractile muscle cells, and integrated sensing elements will monitor the motion of the tissue constructs, improving functionality and autonomy. We will use granular hydrogels to develop sensing components to monitor the state of 3D organoids.
Keywords
Tissue engineering, muscle tissue, muscle cells, bioprinting, biofabrication, biohybrid robotics, soft robotics, 3D printing, biomaterials, electrical stimulation, actuation, bioprinting, bionic sensors, 3D organoids.
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-04-29 , Earliest start: 2024-04-30 , Latest end: 2025-01-31
Organization Soft Robotics Lab
Hosts Filippi Miriam
Topics Medical and Health Sciences , Engineering and Technology , Biology
Task Planning with Pre-trained Foundation Models for Legged Mobile Manipulators

Imagine this scenario: you return home after a tiring day at work. Instead of reaching for a drink yourself, you simply instruct your home robot, perhaps with a casual "Fetch me a cold drink" or even a specific request like "Could you mix me a gin and tonic?". The robot then undertakes a series of actions, such as navigating to the fridge, opening it, identifying a cold beverage, and bringing it back to you. Such a seemingly intricate task might have once been confined to the realm of science fiction. However, thanks to the rise of powerful foundation models, this futuristic vision is gradually turning into reality. Currently, experts in robotics painstakingly design numerous behaviors to accomplish a limited range of tasks. Furthermore, operators require extensive training to navigate these intricate systems. With the rise of foundation models capable of perception and reasoning, robots can now understand human instructions across languages, comprehend complex environments, and plan extended sequences of actions, such as preparing a cup of coffee. We find ourselves at a crucial juncture where general-purpose robots are finally within reach. In this project, we seek to advance the field of mobile manipulation using these powerful pretrained foundation models. In particular, we’ll exploit knowledge embedded in VLMs and LLMs to allow the robot to better interpret a task given by a human and develop an understanding of how to achieve and verify the completion of this task.
Keywords
Zero-shot task planning, mobile manipulation
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-29 , Earliest start: 2024-05-01
Applications limited to EPFL - Ecole Polytechnique Fédérale de Lausanne , ETH Zurich , [nothing]
Organization Robotic Systems Lab
Hosts Qu Kaixian , Zurbrügg René , Cramariuc Andrei
Topics Engineering and Technology
Advanced formulation and manufacturing of personalized sport supplements for increased absorption and bioavailability
Conventional pharmaceutical and nutraceutical products (e.g., sport supplements) provide limited control over the release of bioactive ingredients (AIs) and poor absorption and bioavailability. To grant a proper therapeutic effect and athletic performance, common products need frequent intake at high dosages. This scenario is associated with an increased risk of short and long-term complications that can affect the performance of athletes as well as compromise the health long-term. Recently, novel techniques (e.g., 3D printing) and biomaterial formulation have become available for personalized sport supplements. The high versatility, flexibility, and increase absorption resulting from such products, open the way for increasing performance in sport but also for health benefits to generic people by target physiological characteristics and needs of specific groups.
Labels
Semester Project , Internship , Lab Practice , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-04-26 , Earliest start: 2024-04-29 , Latest end: 2024-12-31
Organization Macromolecular Engineering Laboratory
Hosts Guzzi Elia
Topics Medical and Health Sciences , Engineering and Technology , Chemistry , Biology
Mid-Range Path Planning Integrating Vision with LLM and Depth Sensing
This project aims to advance the field of robotic navigation by focusing on mid-range path planning, a crucial layer that connects the overarching routes designed by global planning and the immediate, reactive maneuvers of local planning. The project will develop a neural network model capable of generating a sequence of waypoints toward a specified 3D goal position by leveraging current RGB images, GPT cost reasoning from large language model (LLM) , and estimated depth images. This integration will facilitate more efficient navigation through complex environments by smoothing transitions between planning layers and optimizing route adjustments in real-time.
Keywords
Robot Planning; Vision Learning; LLM (Vision GPT) Reason,
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-26 , Earliest start: 2024-05-01 , Latest end: 2025-01-01
Organization Robotic Systems Lab
Hosts Yang Fan
Topics Information, Computing and Communication Sciences
Development of a gastric delivery system for micronutrient supplementation using advanced manufacturing techniques
Iron deficiency anemia (IDA) is one of the most widespread nutritional deficiencies worldwide, increasing the risk for disability and death for more than two billion people. Iron supplements are needed for prevention of iron deficiency, especially among infants, children and pregnant women, and for correction of IDA in all affected individuals. Conventional iron supplements, commonly cause nausea, epigastric discomfort and other gastrointestinal side effects that lead many individuals to discontinue and avoid their use. In this project, gastric resident systems (GDSs) will be produced using advanced manufacturing approaches (e.g., 3D printing) and the resulting release kinetic of the bioactive compounds will be characterized. Based on the results, different GDSs 3D design, formulations, and combination of active compounds will be tested.
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-04-24 , Earliest start: 2024-02-01 , Latest end: 2025-01-31
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , University of Zurich
Organization Macromolecular Engineering Laboratory
Hosts Guzzi Elia
Topics Medical and Health Sciences , Engineering and Technology , Chemistry , Biology
Semester and Masters Projects in the Optical Nanomaterial Group at ETH
We have several projects on integrated and free-space nonlinear optics experiments. This includes expeirments with lithium niobate photonics for frequency conversion and quantum information; analog computing in disordered media; characterization of nonlinear materials. These projects include simulations of nonlinear optical systems, fabrication and analysis techniques, optical characterization and data analysis.
Keywords
Nonlinear optics, photonic integrated circuits, quantum photonics, frequency conversion, analog computing, photon-pair generation, optical characterization
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Contact Details
More information
Published since: 2024-04-23
Organization Optical Nanomaterial Group
Hosts Chapman Robert
Topics Physics
Biomineralization of Hydrogels-Based Structures
Currently, the mineralization capacity of S. pasteurii is being exploited in developing construction materials in the form of bio-bricks and bio-cement. These materials are mostly compact structures with different degrees of porosity to increase the diffusion of nutrients through the material. Nevertheless, one recurrent challenge in biomineralized structures is the limited precipitation across the structure.
Keywords
Biomineralization, Hydrogel Scaffolds, Bacteria, 3D Printing
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-20 , Earliest start: 2024-04-22 , Latest end: 2025-02-28
Organization Complex Materials
Hosts Enrriquez Nadia
Topics Engineering and Technology , Chemistry , Biology
Experimental Evaluation of 3D Printed Electronics Using Multimaterial FDM Printing

Multimaterial FDM printing is one of the most prominent ways of directly printing electronics into structural parts. However, so far, there is no comprehensive data on the relationship between different print settings and the resulting electrical properties. The goal of this thesis is to experimentally evaluate the properties to open up the use of the process for 3D printed electronics.
Keywords
3D Printing, 3D Printed Electronics; Experiments; Testing
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-19 , Earliest start: 2024-04-07 , Latest end: 2024-12-31
Applications limited to ETH Zurich
Organization pd|z Product Development Group Zurich
Hosts Vögerl Johannes
Topics Engineering and Technology
Explorative Study of 3D-Printed Potentiometer Designs

Explore the cutting-edge world of 3D-printed potentiometers, integrating electrical components directly into parts using new conductive filaments. This thesis focuses on developing and experimentally testing various 3D-printed potentiometer designs, aiming to identify optimal designs and general design guidelines. Join this exciting project at the intersection of 3D printing and electronics integration, contributing to the evolution of potentiometer design.
Keywords
Design; 3D Printing; Testing; Potentiometer
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-19 , Earliest start: 2024-04-19 , Latest end: 2025-05-15
Applications limited to ETH Zurich , [nothing]
Organization pd|z Product Development Group Zurich
Hosts Vögerl Johannes
Topics Engineering and Technology
Development of a 3D Printing Slicer for 3D Printed Electrical Wires

This thesis examines the importance of electrical wiring in engineering, highlighting issues like entanglement, labor-intensive assembly, and added weight. It proposes integrating wiring directly into components using 3D printing. Previous projects have explored 3D printing electronics, including an autonomous design tool with Rhino Grasshopper. However, the layer-by-layer approach in 3D printing introduces variations in electrical properties. The thesis aims to develop a slicing tool to improve material properties. Depending on the thesis type and personal interests, the project may include experimental characterization of 3D-printed samples, integrating findings into the slicing tool.
Keywords
3D Printing, 3D Printed Electronics, Wiring, Sicing, Programming, Design Automation
Labels
Semester Project , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-19 , Earliest start: 2024-04-19 , Latest end: 2025-03-28
Applications limited to ETH Zurich
Organization pd|z Product Development Group Zurich
Hosts Vögerl Johannes
Topics Engineering and Technology
Co-Axial extrusion for biocementation

The project investigates the development of a co-axial extrusion methods for large-scale 3D printing bio-cementation structures. The extruded paste will host microorganisms such as S.Pasteurii, capable of precipitating calcite (MICP) to create bio-concrete structures. A robotic paste 3D printing platform will be used for the fabrication process; the bio-paste will be precipitated and calcified by the bacterial activity reinforcing the material.
Keywords
co-axial, 3d printing, biocementation, MICP, robotics, mechanical engineering
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-04-17 , Earliest start: 2024-05-01 , Latest end: 2024-12-31
Organization Digital Building Technologies
Hosts Antorveza Karen
Topics Engineering and Technology , Chemistry , Architecture, Urban Environment and Building
Making Novel Porous Bacterial Cellulose Hydrogels for Sustainable Applications

Pressing challenges in climate change require the development of the next generation of renewable materials addressing cooling, CO2 capture and energy production. Bacterial cellulose (BC) is a very promising material to be used in a sustainable future as it is purer than plant-extracted cellulose and most importantly, it is produced in a sustainable and scalable way [1]. To exploit the use of BC as a functional material, such as heat insulators or filters, we need to develop robust methods to control their macrostructure. In this project, you will explore the combination of phase separation techniques [2,3] in bacterial cellulose hydrogels to tune the morphology of the phase. And study the optical and mechanical properties of the resulting novel materials. [1] Z. Wu, et al. ‘Insights into hierarchical structure–property–application relationships of advanced bacterial cellulose materials’, Advanced Functional Materials 33, 2214327 (2023). [2] Fernandez-Rico et al, ‘Putting the Squeeze on Phase separation’, JACS Au (2021). [3] Fernandez-Rico et al, ‘Elastic microphase separation produced robust bicontinuous materials’, Nature Materials (2023).
Keywords
Sustainability, Soft Materials, Bacterial Cellulose
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-04-17 , Earliest start: 2024-05-15 , Latest end: 2025-02-28
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne
Organization Complex Materials
Hosts Fernandez Carla
Topics Engineering and Technology , Chemistry , Biology , Architecture, Urban Environment and Building , Physics
Development of a smart sock for plantar pressure monitoring

The goal of the project is to develop and test a smart sock prototype for plantar pressure measurements. The smart sock contains textile based pressure sensors and a readout module. This technology can be used for plantar pressure monitoring in diverse wearable applications ranging from healthcare to sports.
Keywords
wearables, smart textiles, plantar pressure, pressure sensors
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-04-16 , Earliest start: 2024-03-01 , Latest end: 2025-02-28
Organization Biomedical and Mobile Health Technology Lab
Hosts Galli Valeria
Topics Medical and Health Sciences , Engineering and Technology
Image Based Robust Pose Estimation for General Excavator Buckets

The efficient operation of excavators in construction environments necessitates precise pose estimation of their buckets. Current methods rely on IMUs placed on the excavator arm which require tedious calibration and can be damaged during construction operations. This project aims to leverage computer vision and machine learning to enhance pose estimation, thereby enabling VR overlays for teleoperation and facilitating automation tasks.
Keywords
Computer Vision, Machine Learning, Synthetic Images, Excavators, Construction, 3D Pose Estimation
Labels
Semester Project , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-04-16 , Earliest start: 2024-04-01
Organization Robotic Systems Lab
Hosts Schorp Vincent , Terenzi Lorenzo
Topics Information, Computing and Communication Sciences
Battery Engineering Internship/Working student (paid)
About 8inks: Lithium-ion batteries have revolutionized the world we live in today by enabling applications in mobile electronics ranging from laptops, smart phones, to smart watches. Today, electrification of large industries such as electric passenger vehicles, trucks, grid energy storage, and aviation is inhibited as conventional lithium-ion batteries approach the limits of their performance. NextGen batteries are considered to bring the required performance improvements but lack a low-cost, scalable manufacturing solution for market breakthrough. At eightinks, we develop a revolutionary manufacturing solution of NextGen batteries: multilayer curtain coating. Our technology allows high battery energy density, charging speed, and safety, all combined with lower production costs. It is material agnostic and can serve as a platform solution for various segments of the battery market. To develop our technology to the earliest possible market entry, we are working on all relevant aspects of NextGen battery design, production, assembly, and testing.
Keywords
lithium ion batteries, startup, mechanical engineering, rapid prototyping
Labels
Internship , Student Assistant / HiWi
Description
Contact Details
More information
Published since: 2024-04-16 , Earliest start: 2024-05-05 , Latest end: 2024-09-01
Organization Materials and Device Engineering Group (Wood)
Hosts Sauter Christina
Topics Engineering and Technology
Assessing the innovation potential of electrochemical direct air capture
Rapid emission reductions are needed so that the Paris Agreement's target to limit global warming to well below 2°C remains attainable. Pathways in line with this target presume a swift transition to low-carbon energy sources and – on top – the deployment of carbon dioxide removal (CDR) technologies to remove historic emissions and compensate for emissions that cannot be completely eliminated. Direct air capture (DAC) with carbon storage offers a scalable, permanent, and relatively easily measurable, reportable, and verifiable CDR method. However, DAC technologies are still in their infancy and high costs have hindered large-scale deployment of DAC. While there are advantages to DAC in its potential to address emissions from distributed sources, the development and deployment of DAC systems has been limited by their high cost and energy requirements.[1] Most research and development has focused on solid sorbent and liquid solvent DAC, both of which use thermal and electrical energy. To overcome the high energy requirements of DAC systems using thermal energy, electrochemical DAC systems have been recognized as a promising alternative due to their potentially lower energy consumption at lower temperatures and pressures. [2] However, the technological maturity of electrochemical DAC systems is low, with most systems still at laboratory scale. It remains to be assessed how they compare with DAC systems using thermal energy. References: [1] doi.org/10.1016/j.joule.2024.02.005 [2] doi.org/10.1039/D0EE03382K
Keywords
Direct air capture - CO2 capture - Technology innovation - Electrochemistry - Chemical engineering
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-15 , Earliest start: 2024-04-15 , Latest end: 2024-12-20
Organization Laboratory for Electrochemical Energy Systems
Hosts de Vries Anna
Topics Engineering and Technology , Economics , Chemistry , Policy and Political Science
Practical Rod and Wire Production Techniques for Advanced Alloys and Composites

Meeting the demands of evolving manufacturing and environmental landscapes frequently entails the development of pioneering processes and materials. Yet, generating innovative materials presents its own set of challenges. This project necessitates the establishment of a methodology for producing rods and wires, facilitating the production of powder for novel alloys. To accomplish this task, a forging machine known as a round swage will be employed. The created rods and wires will be used to produce powder using Ultrasonic Plasma Atomizer (UPA) and the wires will be used as is for Directed Energy Deposition (DED), an additive manufacturing technology.
Keywords
Manufacturing, Innovative Materials, Aluminium processing, Rods and wires production
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-04-11 , Earliest start: 2024-05-19 , Latest end: 2025-02-15
Organization Advanced Manufacturing Laboratory
Hosts Papis Konrad, Dr.
Topics Engineering and Technology
Self-grown meat analogue

Materials made with fungal mycelium have recently gained popularity as novel material in various industries, among others to produce meat analogues. So far, we successfully devised a straightforward technique for producing foamed hydrogel scaffolds that facilitate the growth of fungal mycelium. Our next objective involves refining the design of the 3D food matrix to serve as a host material, allowing us to guide the growth of mycelium and create an anisotropic material with fibrous texture similar to meat fibers. This will be achieved by employing a variety of triggers known to influence the direction of fungal mycelial growth.
Keywords
biotechnology, fermentation, fungi, mycelium, meat analogue, food processing, material science
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-04-09 , Earliest start: 2024-08-05 , Latest end: 2025-03-15
Organization Laboratory of Food Process Engineering
Hosts Nussbaum Natalie
Topics Engineering and Technology , Biology
Project or thesis student, 60-100%, m/f/d

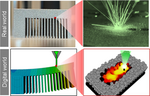
qCella, a deep tech startup from ETH Zurich, specializes in innovative materials for resistive heating applications. Their paper-thin, flexible heating mats aim to replace traditional heating wire technology in various products like car seats, clothing, and shoes. They are looking for master's students in Materials Science or Chemistry to contribute to product and material development, tackle research challenges with practical applications, design and conduct experiments, and analyze results.
Keywords
materials science, chemical synthesis, internship, startup
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-04-08
Organization Multifunctional Materials
Hosts Lin Weyde
Topics Engineering and Technology , Chemistry
Design & Implementation of Wireless Video Transmission for Endoscopy

In vivo wireless video transmission is cutting-edge but largely unexplored area of research promising to improve a wide variety of minimally-invasive procedures.
Keywords
Wireless video transmission Endoscopy Minimally-invasive procedures Capsule endoscopy Circuit design
Labels
Semester Project , Internship , Master Thesis , Student Assistant / HiWi
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-08 , Earliest start: 2024-04-15 , Latest end: 2024-08-31
Organization Multiscale Robotics Lab
Hosts Lyttle Sean
Topics Engineering and Technology
Deep Learning of Residual Physics For Soft Robot Simulation
Incorporating state-of-the-art deep learning approaches to augment conventional soft robotic simulations for a fast, accurate and useful simulation for real soft robots.
Keywords
Soft Robotics, Machine Learning, Physical Modeling, Simulation
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-03 , Earliest start: 2024-04-01 , Latest end: 2024-12-31
Organization Soft Robotics Lab
Hosts Michelis Mike , Katzschmann Robert, Prof. Dr.
Topics Information, Computing and Communication Sciences , Engineering and Technology
Learning Pose Estimation for Partially Occluded Objects from Simulation

This project addresses the task of 6D pose estimation for general-purpose objects, particularly when dealing with occlusion. We aim to leverage recent deep learning methods and synthetic data generation schemes to enable robust object manipulation.
Keywords
Object Pose Estimation, Perceptive Manipulation, Photorealistic Simulation
Labels
Semester Project , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-04-03
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne
Organization Robotic Systems Lab
Hosts Zurbrügg René , Bhardwaj Arjun , Patil Vaishakh
Topics Information, Computing and Communication Sciences
Biophysically and molecularly defined 3D in vitro skin cancer model

In the past few years, there has been significant progress in developing 3D in vitro cancer models. These models serve as a link between 2D cell culture models and in vivo xenograft mouse models, which are considered the gold standard in cancer research and preclinical drug assessment. Various 3D methods have been explored, and among them, spheroids have shown great potential as an alternative to traditional methods. These are often used in a scaffold-free context lacking the physical environment and interactions present in vivo. Therefore, scaffold-based approaches have gained more attention due to their ability to mimic the tumor microenvironment (TME), which is a crucial factor in tumor behavior. By providing a scaffold that mimics the TME, we can gain a better understanding of the influence of TME on tumor spheroid behavior and drug response. This project aims to establish a 3D scaffold-based spheroid tumor model that mimics the behavior of human squamous cell carcinoma (SCC) at varying degrees of aggressiveness. The model will be designed to replicate the tumor and its microenvironment using a molecular and biophysical defined system. The ultimate objective is to create optimized models that have a physiological similarity to human SCC, which can enhance overall knowledge and increase the predictive value, enabling preclinical-to-clinical translation. By doing this, we hope to provide a 3D in vitro model that can reduce and potentially replace the use of animal models as whenever possible.
Keywords
3D, alginate, hydrogels, in vitro models, tissue engineering, tumor microenvironment, spheroids, skin cancer
Labels
Internship , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-04-03 , Earliest start: 2024-08-01
Organization Macromolecular Engineering Laboratory
Hosts Da Silva André Gabriela
Topics Medical and Health Sciences , Engineering and Technology , Biology
Estimation and Learning for Wire-Arc Additive Manufacturing
Designing filters for jointly estimating thermal fields in Wire-Arc Additive manufacturing and learning the parameters of the underlying models.
Keywords
State estimation, Optimization, Wire-Arc additive manufacturing, Sensor fusion, Thermal imaging
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-04-02 , Earliest start: 2024-01-01 , Latest end: 2024-08-31
Organization Advanced Manufacturing Laboratory
Hosts Sideris Iason , Muntwiler Simon
Topics Engineering and Technology
Assessing the feasibility of plantar pressure measurement devices for monitoring the diabetic population
The goal of the project is to assess the feasibility of using commercially available plantar pressure monitoring devices (so called smart insoles) on the diabetic population. Pressure ulcers are a common complication of the diabetic foot, and monitoring plantar pressure continuously is a potential measure of prevention. Diabetic patients are often prescribed personalized footwear (e.g., curved insoles that accommodate any deformity in the feet). This project aims at assessing the potential of the smart insoles available on the market to monitor plantar pressure in diabetic patients with such custom footwear.
Keywords
wearables, mobile health, prevention, plantar pressure monitoring, diabetic foot
Labels
Semester Project , Bachelor Thesis
Description
Goal
Contact Details
More information
Published since: 2024-03-26 , Earliest start: 2024-04-08 , Latest end: 2024-09-02
Organization Biomedical and Mobile Health Technology Lab
Hosts Galli Valeria
Topics Medical and Health Sciences , Engineering and Technology
Lifelike Agility on ANYmal by Learning from Animals
The remarkable agility of animals, characterized by their rapid, fluid movements and precise interaction with their environment, serves as an inspiration for advancements in legged robotics. Recent progress in the field has underscored the potential of learning-based methods for robot control. These methods streamline the development process by optimizing control mechanisms directly from sensory inputs to actuator outputs, often employing deep reinforcement learning (RL) algorithms. By training in simulated environments, these algorithms can develop locomotion skills that are subsequently transferred to physical robots. Although this approach has led to significant achievements in achieving robust locomotion, mimicking the wide range of agile capabilities observed in animals remains a significant challenge. Traditionally, manually crafted controllers have succeeded in replicating complex behaviors, but their development is labor-intensive and demands a high level of expertise in each specific skill. Reinforcement learning offers a promising alternative by potentially reducing the manual labor involved in controller development. However, crafting learning objectives that lead to the desired behaviors in robots also requires considerable expertise, specific to each skill.
Keywords
learning from demonstrations, imitation learning, reinforcement learning
Labels
Master Thesis
Description
Contact Details
More information
Published since: 2024-03-25
Organization ETH Competence Center - ETH AI Center
Hosts Li Chenhao , Li Chenhao , Klemm Victor
Topics Information, Computing and Communication Sciences
Learning Real-time Human Motion Tracking on a Humanoid Robot
Humanoid robots, designed to mimic the structure and behavior of humans, have seen significant advancements in kinematics, dynamics, and control systems. Teleoperation of humanoid robots involves complex control strategies to manage bipedal locomotion, balance, and interaction with environments. Research in this area has focused on developing robots that can perform tasks in environments designed for humans, from simple object manipulation to navigating complex terrains. Reinforcement learning has emerged as a powerful method for enabling robots to learn from interactions with their environment, improving their performance over time without explicit programming for every possible scenario. In the context of humanoid robotics and teleoperation, RL can be used to optimize control policies, adapt to new tasks, and improve the efficiency and safety of human-robot interactions. Key challenges include the high dimensionality of the action space, the need for safe exploration, and the transfer of learned skills across different tasks and environments. Integrating human motion tracking with reinforcement learning on humanoid robots represents a cutting-edge area of research. This approach involves using human motion data as input to train RL models, enabling the robot to learn more natural and human-like movements. The goal is to develop systems that can not only replicate human actions in real-time but also adapt and improve their responses over time through learning. Challenges in this area include ensuring real-time performance, dealing with the variability of human motion, and maintaining stability and safety of the humanoid robot.
Keywords
real-time, humanoid, reinforcement learning, representation learning
Labels
Master Thesis
Description
Contact Details
More information
Published since: 2024-03-25
Organization ETH Competence Center - ETH AI Center
Hosts He Junzhe , Li Chenhao , Li Chenhao
Topics Information, Computing and Communication Sciences
Continuous Skill Learning with Fourier Latent Dynamics

In recent years, advancements in reinforcement learning have achieved remarkable success in teaching robots discrete motor skills. However, this process often involves intricate reward structuring and extensive hyperparameter adjustments for each new skill, making it a time-consuming and complex endeavor. This project proposes the development of a skill generator operating within a continuous latent space. This innovative approach contrasts with the discrete skill learning methods currently prevalent in the field. By leveraging a continuous latent space, the skill generator aims to produce a diverse range of skills without the need for individualized reward designs and hyperparameter configurations for each skill. This method not only simplifies the skill generation process but also promises to enhance the adaptability and efficiency of skill learning in robotics.
Keywords
representation learning, periodic autoencoders, learning from demonstrations, policy modulating trajectory generators
Labels
Master Thesis
Description
Contact Details
More information
Published since: 2024-03-25
Organization ETH Competence Center - ETH AI Center
Hosts Li Chenhao , Rudin Nikita
Topics Information, Computing and Communication Sciences , Engineering and Technology
Universal Humanoid Motion Representations for Expressive Learning-based Control
Recent advances in physically simulated humanoids have broadened their application spectrum, including animation, gaming, augmented and virtual reality (AR/VR), and robotics, showcasing significant enhancements in both performance and practicality. With the advent of motion capture (MoCap) technology and reinforcement learning (RL) techniques, these simulated humanoids are capable of replicating extensive human motion datasets, executing complex animations, and following intricate motion patterns using minimal sensor input. Nevertheless, generating such detailed and naturalistic motions requires meticulous motion data curation and the development of new physics-based policies from the ground up—a process that is not only labor-intensive but also fraught with challenges related to reward system design, dataset curation, and the learning algorithm, which can result in unnatural motions. To circumvent these challenges, researchers have explored the use of latent spaces or skill embeddings derived from pre-trained motion controllers, facilitating their application in hierarchical RL frameworks. This method involves training a low-level policy to generate a representation space from tasks like motion imitation or adversarial learning, which a high-level policy can then navigate to produce latent codes that represent specific motor actions. This approach promotes the reuse of learned motor skills and efficient action space sampling. However, the effectiveness of this strategy is often limited by the scope of the latent space, which is traditionally based on specialized and relatively narrow motion datasets, thus limiting the range of achievable behaviors. An alternative strategy involves employing a low-level controller as a motion imitator, using full-body kinematic motions as high-level control signals. This method is particularly prevalent in motion tracking applications, where supervised learning techniques are applied to paired input data, such as video and kinematic data. For generative tasks without paired data, RL becomes necessary, although kinematic motion presents challenges as a sampling space due to its high dimensionality and the absence of physical constraints. This necessitates the use of kinematic motion latent spaces for generative tasks and highlights the limitations of using purely kinematic signals for tasks requiring interaction with the environment or other agents, where understanding of interaction dynamics is crucial. We would like to extend the idea of creating a low-level controller as a motion imitator to full-body motions from real-time expressive kinematic targets.
Keywords
representation learning, periodic autoencoders
Labels
Master Thesis
Description
Contact Details
More information
Published since: 2024-03-25
Organization ETH Competence Center - ETH AI Center
Hosts Li Chenhao , Li Chenhao , Li Chenhao
Topics Information, Computing and Communication Sciences , Engineering and Technology
Parallel computing: MPI-Based Parallelization of Laser Fusion Simulation with SPH Framework
The Advanced Manufacturing Lab (am|z) is excited to announce a thesis opportunity focusing on the development of a highly parallelizable modeling framework for additive manufacturing (AM) processes, particularly laser powder bed fusion (LPBF). Our research primarily delves into advancing manufacturing techniques, with a special emphasis on additive manufacturing. We have developed a robust numerical simulation framework called iMFREE utilizing Smoothed Particle Hydrodynamics (SPH) for multi-physics applications like LPBF. However, there is a need to enhance computational efficiency, specifically through parallelization via Message Passing Interface (MPI). This project offers an excellent chance for students to deepen their knowledge in parallel computation while working hands-on with a mature computational framework.
Keywords
MPI, Parallel computing, Additive manufacturing, AM, Laser powder bed fusion, LPBF, Computational science
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-03-25 , Earliest start: 2024-03-25
Organization Advanced Manufacturing Laboratory
Hosts Lüthi Christof
Topics Information, Computing and Communication Sciences , Engineering and Technology
Humanoid Locomotion Learning and Finetuning from Human Feedback

In the burgeoning field of deep reinforcement learning (RL), agents autonomously develop complex behaviors through a process of trial and error. Yet, the application of RL across various domains faces notable hurdles, particularly in devising appropriate reward functions. Traditional approaches often resort to sparse rewards for simplicity, though these prove inadequate for training efficient agents. Consequently, real-world applications may necessitate elaborate setups, such as employing accelerometers for door interaction detection, thermal imaging for action recognition, or motion capture systems for precise object tracking. Despite these advanced solutions, crafting an ideal reward function remains challenging due to the propensity of RL algorithms to exploit the reward system in unforeseen ways. Agents might fulfill objectives in unexpected manners, highlighting the complexity of encoding desired behaviors, like adherence to social norms, into a reward function. An alternative strategy, imitation learning, circumvents the intricacies of reward engineering by having the agent learn through the emulation of expert behavior. However, acquiring a sufficient number of high-quality demonstrations for this purpose is often impractically costly. Humans, in contrast, learn with remarkable autonomy, benefiting from intermittent guidance from educators who provide tailored feedback based on the learner's progress. This interactive learning model holds promise for artificial agents, offering a customized learning trajectory that mitigates reward exploitation without extensive reward function engineering. The challenge lies in ensuring the feedback process is both manageable for humans and rich enough to be effective. Despite its potential, the implementation of human-in-the-loop (HiL) RL remains limited in practice. Our research endeavors to significantly lessen the human labor involved in HiL learning, leveraging both unsupervised pre-training and preference-based learning to enhance agent development with minimal human intervention.
Keywords
reinforcement learning from human feedback, preference learning
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-03-25
Organization ETH Competence Center - ETH AI Center
Hosts Li Chenhao , Li Chenhao , Chen Xin , Li Chenhao
Topics Information, Computing and Communication Sciences , Engineering and Technology
Development of instrumentation and analytics for powder bed quality for additive manufacturing

The quality of powder bed-based additive manufacturing processes is heavily dependent on the uniformity and repeatability of the powder spreading process. Left undetected, deviations in the powder bed can result in defective parts, which may lead to catastrophic failures. This project is to develop instrumentation and signal processing algorithms that can detect and classify anomalies in the powder bed of a metal 3D printer.
Keywords
Mechanical design, instrumentation, signal processing, image processing, statistics, additive manufacturing, 3D printing, quality control
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-03-22 , Earliest start: 2023-10-23 , Latest end: 2024-10-22
Organization Institute of Machine Tools and Manufacturing
Hosts Tucker Michael Robert
Topics Engineering and Technology
Design and fabrication of thermally tunable metallic structures
Certain design applications require structures that remain dimensionally stable despite large swings in ambient temperature. Typically, these make use of exotic materials that are highly toxic and challenging to machine. In this project, we will investigate the producibility of dimensionally stable metallic structures that are produced from conventional materials via a novel additive manufacturing (i.e. 3D printing) process.
Keywords
Mechanical engineering, materials engineering, finite element modeling, structural design and analysis, 3D printing, additive manufacturing
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-03-22 , Earliest start: 2022-10-05 , Latest end: 2023-10-04
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , CSEM - Centre Suisse d'Electronique et Microtechnique , Empa
Organization Institute of Machine Tools and Manufacturing
Hosts Tucker Michael Robert
Topics Engineering and Technology
Control Software Development for Advanced Laser Powder Bed Fusion Additive Manufacturing

In this project, software will be written to enable advanced multi-laser and beam shaping process control for deployment to a commercial laser powder bed fusion additive manufacturing machine.
Keywords
Mechanical engineering, electrical and control systems, software development, 3D printing, additive manufacturing
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-03-22 , Earliest start: 2022-10-05 , Latest end: 2023-10-04
Organization Advanced Manufacturing Laboratory
Hosts Tucker Michael Robert
Topics Engineering and Technology
Small-molecule supramolecular hydrogelators for hydrogel engineering
The study of small-molecule supramolecular hydrogelators (SMSHs) is of great interest, both fundamental and applicative. Their self-assembly most often leads to the formation of fibrillar structure and can be used as a model for the fibrillation of biologically-relevant entities, also their ability to form gels with tunable mechanical properties suggest many promising materials-related applications. In this context, aminoacid-based SMSHs (AA-SMSHs) have a special relevance because of opportunities offered e.g. in terms of biocompatibility and biomimetics, as well as in terms of variety of molecular design possibilities. Usually, the sol-gel behavior of AA-SMSHs is pH-dependent thanks to the presence of one or more pH-responsive groups, especially carboxylic acid –COOH ones. For these reasons, pH-responsive SMSHs (aminoacid-based and non) have been and still are the subject of intense investigation. Nevertheless, their behavior is far from being completely understood.
Keywords
Hydrogels, gelation, rheology, supramolecular materials
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-03-20 , Earliest start: 2024-04-01 , Latest end: 2024-12-31
Organization Macromolecular Engineering Laboratory
Hosts Dranseikiene Dalia
Topics Engineering and Technology , Chemistry
Machine Learning with little data: PCE on agent-based model of osteoporosis and its treatments

Combine two exploding fields in computer science: machine learning and agent-based modelling. Based on preclinical and in vitro studies of cell behaviour and cytokine reaction-diffusion and mechanical tests we have generated an in-house biofidelic agent-based model of the human skeleton and its response to diseases and their treatments. This model reproduces the effects of several widely used osteoporosis treatments on key parameters used to quantify fracture risk. This rule-based approach involves studying bone mechanobiology at the cell scale and extrapolating this to millions of cells at the tissue scale to understand the pharmacokinetics of treatments and identify possible new therapies and approaches to patient-specific treatment. An alternative approach to in silico prediction of response to treatment is a supervised learning approach where we simply input baseline and follow-up bone scans to a CNN with twelve layers constructed using keras. We then attempt to dive into the black box and quantify what characteristics of the input govern the response of our model. The issue is the clinical data is not big enough to do this well so we use the agent-based model as input to the ML approach to construct a proxy model! This also helps us understand, validate and quantify the uncertainty in the agent-based model. To decide which runs of the agent-based model to use as input to the ML approach to construct the proxy model we use polynomial chaos expansion.
Keywords
machine learning, artificial intelligence, uncertainty quantification, polynomial chaos expansion, agent-based modelling, bone mechanobiology, osteoporosis, patient-specific treatment, personalized medicine, innovation, therapy, medical research, fragility, fractures
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-03-19 , Earliest start: 2024-04-01 , Latest end: 2025-01-01
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , Empa , Eawag , Paul Scherrer Institute , University of Zurich , Wyss Translational Center Zurich , Zurich University of Applied Sciences , Swiss Institute of Bioinformatics , Swiss National Science Foundation , Balgrist Campus , Berner Fachhochschule , CERN , Corporates Switzerland , CSEM - Centre Suisse d'Electronique et Microtechnique , Department of Quantitative Biomedicine , Hochschulmedizin Zürich , IBM Research Zurich Lab , Institute for Research in Biomedicine , Sirm Institute for Regenerative Medicine , Università della Svizzera italiana , Université de Neuchâtel , University of Basel , University of Berne , University of Fribourg , University of Geneva , University of Lausanne , University of Lucerne , University of St. Gallen , RWTH Aachen University , Ludwig Maximilians Universiy Munich , University of Cambridge , University of Oxford , UCL - University College London , Imperial College London , Delft University of Technology , Maastricht Science Programme , IDEA League
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Ledoux Charles
Topics Information, Computing and Communication Sciences , Biology
Food Density Estimation with Machine Learning

Problem: Accurately estimating the weight of food items is a significant challenge in healthcare applications. While state-of-the-art 3D cameras can precisely measure food volume, the lack of datasets with labeled food densities remains a major obstacle for accurately determining food amounts. Goal of the thesis: The thesis aims to create a dataset that includes the volume, weight, and 3D scans of various food items using a state-of-the-art structured light camera. Due to the vast variety of foods, compiling a comprehensive dataset is impractical. Therefore, the project will also include training and testing a machine learning model to predict the densities of food items that were not seen during its training.
Keywords
Food Science, Personalized Nutrition, Medical Nutrition, AI, Machine Learning, 3D Imaging, Food Tracking
Labels
Semester Project , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-03-19 , Earliest start: 2024-03-20
Organization Laboratory of Food Process Engineering
Hosts Bergfreund Jotam
Topics Agricultural, Veterinary and Environmental Sciences , Medical and Health Sciences , Engineering and Technology
NeuroQuake: Sparse SNN models for continual, multi-modal and multi-step earthquake forecasting using the NEST simulator

This project aims to develop advanced earthquake forecasting models using bio-inspired Spiking Neural Networks (SNNs). By exploiting the inherent flexibility of SNNs, the project will create sparse, multi-step forecasting models capable of integrating data from various sources. These models will be built and tested using the NEST neural simulator, emphasizing neuroplasticity, neuromodulation, and neural Darwinism principles. The goal is to enhance the efficiency of earthquake predictions by learning more effectively from limited and lower-quality data, potentially leading to significant improvements in forecasting methods and ultimately reducing the risks associated with seismic events.
Keywords
Spiking Neural Networks, Earthquakes, Forecasting, Sparsity, Frugal AI
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Contact Details
More information
Published since: 2024-03-16 , Earliest start: 2024-03-18 , Latest end: 2025-01-15
Organization Computational Mechanics of Building Materials
Hosts Castellano Miguel
Topics Information, Computing and Communication Sciences , Earth Sciences , Behavioural and Cognitive Sciences
The development of novel high-performance hydrogel materials

Are you interested in designing novel hydrogel materials? We have a project available that focuses on formulating high-performance hydrogels for load-bearing applications.
Keywords
Biomaterials, hydrogels, mechanical properties
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Contact Details
More information
Published since: 2024-03-16 , Earliest start: 2024-07-01
Organization Macromolecular Engineering Laboratory
Hosts Petelinsek Nika
Topics Engineering and Technology , Chemistry
A Personalized Bone Organoid Diagnostic Framework for Predicting Drug Response in Children with Rare Bone Diseases
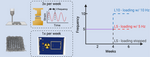
Rare genetic disorders are defined by a prevalence of fewer than 1/2000 people, are chronic and affect patients throughout their lifespan. Osteogenesis imperfecta (OI) is a heterogeneous group of rare genetic bone disorders. OI is a debilitating condition that involves impaired mobility, high fracture incidence and subsequent limb deformities. No treatment exists today that targets the underlying abnormal collagen structure and organization. The mainstay in pediatric care of OI remains antiresorptive therapy with bisphosphonates, despite concerns of long-term effects on depressed bone turnover. While antiresorptive monoclonal antibody treatments are currently undergoing clinical trials in children and young adults, anabolic treatments that directly increase bone formation are currently approved for adults only and decrease in efficacy over a relatively short time span. The experience with these drugs in OI therapy is limited, as clinical studies are still ongoing.
Keywords
bone organoid, diagnostics, bone diseases, 3D bioprinting, personalized medicine
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-03-15 , Earliest start: 2023-11-01 , Latest end: 2024-07-31
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Schädli Gian Nutal
Topics Engineering and Technology
Using LLMs to adjust to human preferences during human-robot collaboration

We want to exploit LLMs to adjust to human preferences while interacting. We think that we can generate desired behaviors by leveraging LLMs to translate the natural language to robot motion, e.g. "move faster, lift higher, come closer". We aim to carry out tests in a robot-human handover scenario.
Keywords
LLMs, deep learning, human-robot interaction, legged robots
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-03-14
Organization Robotic Systems Lab
Hosts Zurbrügg René , Tulbure Andreea
Topics Information, Computing and Communication Sciences , Behavioural and Cognitive Sciences
Unraveling Calcium Dynamics and Immune Interactions in Bone Graft Substitute Environments through Advanced Ratiometric Imaging
This project endeavors to explore the dynamic interplay among calcium ions, bone graft substitutes, and resident immune cells in both orthotopic and ectopic environments, employing advanced ratiometric imaging techniques.
Keywords
Bone Graft Substitute, Calcium, Ratiometric Imaging, Immune Cells, in vitro, in vivo, Intravital Microscopy
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-03-12 , Earliest start: 2024-04-01 , Latest end: 2024-12-31
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Wissmann Stefanie
Topics Engineering and Technology , Biology
Dataset generation of multi-material deformable objects

Current state-of-the-art pipelines for Mesh Reconstruction from Point clouds for deformable objects rely on synthetically generated datasets of objects that are deformed using warping fields. While such augmentations are helpful to assess mesh reconstruction performance of methods, it is not possible to learn more about the objects beyond their abstract mesh structure. For humans, it is trivial to conclude various properties of objects based on how they behave under different forces acting on such objects; e.g., applying local force on an object. A pipeline that generates object deformations based on material properties would implicitly encode such object properties in the resulting time-series mesh deformations. Therefore, allowing for a first-of-its-kind dataset to train machine learning methods that can generalize to gain the same insight as humans about object properties.
Keywords
Simulation of multi-material objects. Dataset generation. Manipulation of deformable objects.
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-03-12 , Earliest start: 2024-03-17 , Latest end: 2024-09-30
Applications limited to ETH Zurich
Organization Computational robotics laboratory (Prof. Stelian Coros)
Hosts Zamora Miguel , Coros Stelian
Topics Information, Computing and Communication Sciences , Engineering and Technology
Development of a novel actuator for soft-robotic applications
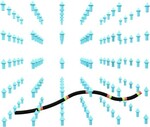
The Multiscale Robotics Lab develops novel actuation methods for endoscopic devices utilizing magnetic navigation systems. Currently, an external magnetic field can steer permanent magnets through the Euclidean space. Although the gradients of the external magnetic field can be controlled, the actuation of the magnetic continuum robot (m-CR) is still limited. This problem can be overcome by actively re-magnetizing the magnets positioned in the m-CR. The pulse-magnetizer’s driving circuit and magnetization feedback sensors needs to be minimized to fulfill the requirements for medical endoscopic devices.
Keywords
Feedback Control, Actuator Design, Magnetic Hysteresis Modeling, Soft Robotics
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-03-11 , Earliest start: 2024-03-01 , Latest end: 2024-08-31
Organization Multiscale Robotics Lab
Hosts Ehmke Claas
Topics Information, Computing and Communication Sciences , Engineering and Technology
Deploying Locomotion Policies Trained in Differentiable Simulation on Real Hardware

In recent years, using deep Reinforcement Learning (RL) for robotic motion policies has demonstrated impressive performance, yielding unprecedented robustness on real hardware. Current sim2real approaches rely on large-scale pre-training with domain randomization to make policies robust but struggle with high-dimensional spaces. Current RL methods are primarily limited by their low sample efficiency. Leveraging differentiable simulators for first-order gradient information shows great results for enhancing sample efficiency. Although promising simulation results exist, deployment on hardware is not usually done. The goal of this thesis is to train quadrupedal locomotion policies in a differentiable simulation framework, and then enable real-world deployment by modifying the simulation, the policy training, or the learning algorithm. Ideally, we can leverage properties of differentiable simulators in this process to improve sim2real transfer by fitting real data.
Keywords
Deep Reinforcement Learning, Differentiable Simulation, Quadrupedal Locomotion Control, Sim2Real
Labels
Semester Project , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-03-11
Organization Robotic Systems Lab
Hosts Klemm Victor
Topics Information, Computing and Communication Sciences , Engineering and Technology
Development of a Heterocellular Human Bone Organoid for Precision Medicine and Treatment

Our goal is to establish a heterocellular 3D printed bone organoid model comprising all major bone cell types (osteoblasts, osteocytes, osteoclasts) to recapitulate bone remodeling units in an in vitro system. The organoids will be produced with the human cells, as they could represent human pathophysiology better than animal models, and eventually could replace them. These in vitro models could be used in the advancement of next-generation personalised treatment strategies. Our tools are different kinds of 3D bioprinting platforms, bio-ink formulations, hydrogels, mol-bioassays, and time-lapsed image processing of micro-CT scans.
Keywords
3D printing, bone organoids, co-culture, bioreactor, hydrogels, drug testing
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-03-08 , Earliest start: 2022-08-01 , Latest end: 2024-08-31
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Steffi Chris
Topics Engineering and Technology , Biology
Unravelling the spatial and biomechanical dynamic of fracture healing in mice

Fracture healing is a complex process that involves inflammation, angiogenesis, and bone remodeling. The remodelling process helps maintain bone density, repair micro-damage that occurs due to everyday activities, and adapt bones to the specific needs of an individual's body. Mechanical loading is a crucial factor in the regulation of fracture healing. The forces and strains experienced by the bone during everyday activities influence the cellular responses, callus formation, bone deposition, remodelling, and, ultimately, the successful recovery of the fractured bone. The mechanisms underlying spatial cell reorganization during loading, which contributes to fracture healing, remain unclear. The project aims to investigate and explore the fracture healing process of mice using spatial transcriptome changes in response to mechanical loading. By shedding light on this aspect, the project aims to contribute to the broader understanding of fracture healing and potentially pave the way for more effective treatment strategies in the future.
Keywords
Spatial transcriptomics, Dimensionality reduction, Spatial expression pattern, Spatial interaction, Cell Segmentation and Visualization, Fracture healing, Bone
Labels
IDEA League Student Grant (IDL) , Semester Project , Course Project , Internship , Bachelor Thesis , Master Thesis , ETH for Development (ETH4D) (ETHZ) , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-03-07 , Earliest start: 2024-03-07 , Latest end: 2024-08-01
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Singh Amit
Topics Medical and Health Sciences , Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology , Biology , Physics
Exploring the 3D Mineralization Behavior in Material-Induced Osteoinduction Through a Multiscale Micro-CT Imaging Approach

The project aims at investigating material-induced osteoinduction using the available mouse model of orthotopic or ectopic bone graft substitute application. Through the 3D-3D registration of ex vivo and in vivo multiscale micro-CT images, crucial 3D mineralization of the BGS can be investigated.
Keywords
Femur, Bone Graft Substitute, Critical Size Defect, Osteoinduction, in vivo, micro-CT, 3D-3D Image Registration, Image Analysis, Image Processing, Python, Computational
Labels
Semester Project , Bachelor Thesis
Description
Goal
Contact Details
More information
Published since: 2024-03-06 , Earliest start: 2024-04-01 , Latest end: 2024-12-31
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Lindenmann Sara
Topics Medical and Health Sciences , Engineering and Technology
Towards AI Safety: Adversarial Attack & Defense on Neural Controllers
The project is collaborating between SRI and RSL/CRL lab and aims to investigate the weakness of the neural controller based on the state-of-the-art [3] attacking method.
Keywords
Adversarial attack; safe AI; Reinforcement learning
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-03-06 , Earliest start: 2024-03-06 , Latest end: 2024-09-30
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne
Organization Robotic Systems Lab
Hosts Shi Fan , Shi Fan , Shi Fan
Topics Information, Computing and Communication Sciences , Engineering and Technology
Physics-informed machine learning in microfluidics

Understanding the distribution and mechanics of velocity and pressure within microaneurysms is crucial for controlling microrobots navigating through them. Traditional methods for velocity and pressure measurement in microchannels, such as particle image velocimetry (PIV) and numerical simulations based on fluidic physics laws, suffer from high computational demands and inability to operate in real-time. Moreover, pure image methods struggle with near-wall regions lacking visible particles. Leveraging recent advancements in machine learning, particularly convolutional neural networks (CNNs), this project proposes a novel approach - a physics-informed CNN integrated with Navier-Stokes equations and optical flow equations. This CNN aims to accurately predict velocity and pressure profiles in microchannel flows in real-time using only flow images and essential physical parameters. The network architecture comprises an encoder-decoder structure with seven convolutional layers, incorporating down-sampling and up-sampling layers. The final output layer produces three channels representing horizontal velocity, vertical velocity, and pressure. Additionally, a physics-informed loss function, incorporating dimensionless Navier-Stokes equation residuals and optical flow equation residuals, enhances the model's performance by integrating knowledge of fluid dynamics and computer vision. This approach represents a promising advancement towards achieving real-time, high-accuracy prediction of velocity and pressure fields in microchannel flows, with potential applications in microrobotics and microfluidics.
Keywords
artificial Intelligence, physics-informed machine learning, microfluidics, fluid dynamics
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-03-05 , Earliest start: 2023-02-09 , Latest end: 2024-09-22
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Medany Mahmoud
Topics Information, Computing and Communication Sciences , Engineering and Technology , Physics
Robotic 3D printing Microbial Biocement

The project investigates different bio-inks for extruding large-scale 3D printing bio-cementation structures. The extruded paste will host microorganisms such as S.Pasteurii, capable of precipitating calcite (MICP) to create bio-concrete structures. A robotic paste 3D printing platform will be used for the fabrication process; the bio-paste will be precipitated and calcified by the bacterial activity reinforcing the material.
Keywords
Living materials, bio-inks, 3D printing, hydrogel, architecture, bio-cementation, MICP
Labels
Semester Project , Internship , Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-03-04 , Earliest start: 2024-03-31 , Latest end: 2024-07-31
Organization Digital Building Technologies
Hosts Antorveza Karen
Topics Engineering and Technology , Biology , Architecture, Urban Environment and Building
Mycelium materials and digital fabrication

The project aims to explore the bio-fabrication of mycelium-based composites and knitted textiles for architecture and construction. Specifically the textile is used as a growing substrate for mycelium material, offering a sustainable and biodegradable building material and structural system that is strong in both tension and compression.
Keywords
mycelium,textiles,performance,construction, bio-fabrication
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis , Other specific labels , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-03-01 , Earliest start: 2024-06-01 , Latest end: 2024-12-01
Organization Digital Building Technologies
Hosts Dillenburger Benjamin
Topics Engineering and Technology
Development of a dynamic supramolecular hydrogel from tumor dECM

We are looking for a motivated Master student to join Empa St. Gallen for this master thesis project. The candidate will be part of an exciting and collaborative project between the Particles-Biology Interactions Lab, the Biointerfaces Lab as well as the Biomimetic Membranes and Textiles Lab at Empa.
Keywords
cancer immunotherapy, hydrogels, dECM hydrogel, nanomedicine, 3D soft materials
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-29 , Earliest start: 2024-05-01 , Latest end: 2025-01-31
Applications limited to EPFL - Ecole Polytechnique Fédérale de Lausanne , ETH Zurich , University of Basel , University of Berne , University of Fribourg , University of Geneva , University of Lausanne , University of Lucerne , University of Zurich , Sirm Institute for Regenerative Medicine , Paul Scherrer Institute , Institute for Research in Biomedicine , Hochschulmedizin Zürich , Empa , Balgrist Campus , Wyss Translational Center Zurich , ETH Competence Center for Materials and Processes (MaP)
Organization Biomimetic Membranes and Textiles
Hosts Wei Kongchang
Topics Engineering and Technology
Towards interpretable learning pipeline: A visual-assisted workflow for locomotion learning

Current reinforcement learning (RL)-based locomotion controllers have shown promising performance. However we are still not clear about what is learned during the training process. In this project, we investigate the proper metrics and visualisation techniques to interactively steer the locomotion learning tasks.
Keywords
Reinforcement learning; visualization; interpretable AI
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-02-28 , Earliest start: 2024-02-26 , Latest end: 2024-08-26
Organization ETH Competence Center - ETH AI Center
Hosts Zhang Xiaoyu , Shi Fan , Wang April , Shi Fan , Shi Fan
Topics Engineering and Technology
Crafting a Photo-Cleavable Crosslinker: Enhancing Watch Design with Chemistry
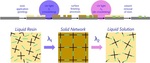
Embark on a journey with the Swiss watch industry, renowned for its dedication to handcrafted excellence. Together, we're delving into the realm of advanced materials to enhance the art of watchmaking. Our focus lies in developing a groundbreaking photo-cleavable crosslinker, a key player in the application of resins onto watch dials as temporary masks during surface finishing. Join us in pioneering the fusion of craftsmanship and cutting-edge technology!
Keywords
resin, polymers, photochemistry, click-chemistry, organic chemistry, synthesis, watch industry
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-02-28 , Earliest start: 2024-02-29 , Latest end: 2024-10-31
Organization Macromolecular Engineering Laboratory
Hosts Wolf Morris
Topics Engineering and Technology , Chemistry
Microrobot manipulation and ultrasound imaging
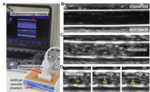
We want to expand the use of acoustic microrobots for biomedical applications by studying their manipulation in 3D environments and their simultaneous real time tracking using non-invasive ultrasound imaging.
Keywords
Microrobots, Ultrasounds, 3D manipulation, Imaging
Labels
Semester Project , Bachelor Thesis , Master Thesis , Summer School
Description
Goal
Contact Details
More information
Published since: 2024-02-27 , Earliest start: 2024-01-01 , Latest end: 2024-10-31
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Del Alexia
Topics Engineering and Technology
Microrobot manipulation in brain tumor model

We want to expand the use of acoustic microrobots for drug delivery biomedical applications in brain tumor environments of small mammalian models.
Keywords
Drug delivery, Microrobots, Ultrasounds
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-27 , Earliest start: 2024-01-01 , Latest end: 2024-09-30
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Del Alexia
Topics Engineering and Technology , Biology
Acoustic microrobots navigation in tumor vasculature model

We want to expand the use of acoustic microrobots for drug delivery applications in tumor environments.
Keywords
Microfluidics, drug delivery, Microrobots, Ultrasound, Biomedical
Labels
Semester Project , Collaboration , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-27 , Earliest start: 2024-02-01 , Latest end: 2024-10-31
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Del Alexia
Topics Engineering and Technology
Fabrication of self-growing magnetic micro-catheters
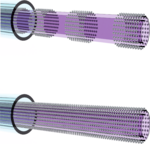
This project aims on the development of a magnetically guidable self-growing micro-catheter.
Keywords
Microrobotics, Self-assembly, Polymers, Nanoparticle
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-02-27 , Earliest start: 2024-02-28 , Latest end: 2024-04-30
Applications limited to ETH Zurich
Organization Multiscale Robotics Lab
Hosts Hertle Lukas
Topics Engineering and Technology
Mechanophores for advanced wearable strain and pressure sensors
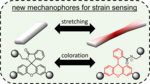
The goal of the project is to synthesize and characterize a number of small molecules capable of acting as mechanophore addition to various polymers. These polymers would then be used as wearable strain or pressure sensors.
Keywords
mechanophore, polymer, wearable, sensor, color, strain, pressure
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-26 , Earliest start: 2023-09-01 , Latest end: 2024-08-01
Organization Biomedical and Mobile Health Technology Lab
Hosts Shokurov Aleksandr
Topics Engineering and Technology , Chemistry
Investigating compromised bone fracture healing in mouse models using time-lapsed in vivo CT imaging and histological analysis.

Delayed bone healing or failed non-unions account for 5 – 10% of all bone fractures and present a challenging problem in regenerative medicine. The impact of delayed unions or non-unions can be devastating with prolonged rehabilitation, decreased quality of life and significant health care costs. Our lab has conducted fracture healing studies in young and prematurely-aged mouse models with different defect sizes. The aim of this project is to analyse data from mice which exhibit delayed unions and non-unions.
Keywords
Bone, Fracture Healing, Image Processing, Histology
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-23 , Earliest start: 2024-02-01 , Latest end: 2025-02-01
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Mathavan Neashan
Topics Engineering and Technology
Automation in MedTech Startup

Interdisciplinary development project for various automation / mechatronics tasks with industry partner Diaxxo
Keywords
robotics, mechatronic, python, arduino, ui, ux, product development, 3d printing, prototyping
Labels
Semester Project , Internship , Lab Practice , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2024-02-23 , Earliest start: 2024-01-08 , Latest end: 2024-09-30
Organization pd|z Product Development Group Zurich
Hosts Gregorini Michele , Fox Stephan Cecil
Topics Medical and Health Sciences , Engineering and Technology
Formulating and testing a photo-reversible resin for coating various surfaces
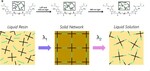
Photo-reversible chemistries have opened new possibilities especially in the field of biomedical engineering and our lab has contributed to this process by research on hydrogels based on various dynamic chemistries. We now want to adapt one known and working photo-cleavable linker in a system that is based on organic solvents rather than water. This would allow for the use of the material in a wide range of industrial applications including the digital printing of temporary masks during surface treatments.
Keywords
engineering, materials, resin, polymers, manufacturing
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-21 , Earliest start: 2024-02-11 , Latest end: 2024-12-31
Organization Macromolecular Engineering Laboratory
Hosts Wolf Morris
Topics Engineering and Technology , Chemistry
Scan Path Generation for a Novel Highly Efficient Powder Bed Fusion (PBF) Machine

The collaboration between Advanced Manufacturing Lab (am|z) and Automatic Control Lab (IFA) is centered on developing a novel scan path generator for a laser powder bed fusion (PBF) machine capable of processing multiple materials simultaneously. The aim is to integrate the Machine Control Framework (AMCF) with our machine control system to enhance controlability and reliability.
Keywords
Programming, Software, Architecture, Control, Javascript, Scan path, Laser, Powder bed fusion,
Labels
Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-02-21 , Earliest start: 2024-02-14
Organization Advanced Manufacturing Laboratory
Hosts Balta Efe , Steffen Raphael
Topics Information, Computing and Communication Sciences , Engineering and Technology
Agent-based modelling of bone regeneration in ageing populations

Are you a motivated Bachelor's or Master's student willing to learn and develop a micro-Mulitphysics Agent-Based (micro-MPA) model to predict adaptation and regeneration of aged bone? This project offers an opportunity to gain valuable work experience in computational modelling within a highly interdisciplinary Lab.
Keywords
agent-based, machine learning, artificial intelligence, modelling, bone mechanobiology, ageing, personalized medicine, medical research, biomechanics
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-02-21 , Earliest start: 2024-02-19 , Latest end: 2024-09-30
Applications limited to ETH Zurich
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Kendall Jack
Topics Medical and Health Sciences , Engineering and Technology , Biology
End-to-end Leaning Terrain Cost with Robot Kinematic Constraints

Navigating the unpredictable off-road environment, autonomous robots require a tailored approach to overcome obstacles and optimize pathfinding. Our proposed terrain cost mapping system goes beyond traditional processing by factoring in each robot's specific kinematic abilities. We introduce a novel simulation-based Roll-Out technique to predict a robot's stability over varied terrains, thereby calculating a precise terrain cost. This innovative strategy promises to enhance autonomous navigation by ensuring safe and efficient traversal tailored to individual robotic capabilities.
Keywords
Leaning Terrain Cost; Off-road Navigation; Robot Kinematics
Labels
Semester Project , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-02-21 , Earliest start: 2023-11-30 , Latest end: 2024-01-31
Organization Robotic Systems Lab
Hosts Yang Fan
Topics Information, Computing and Communication Sciences
3D reconstruction of zebrafish larvae based on acoustic rotating
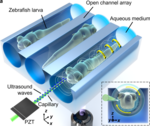
The project is a collaboration between ARSL and CVL. For acoustics, Prof. Daniel will guide you and for AI, Prof. Fisher Yu will guide you. We plan to develop a special 3D reconstruction algorithm for zebrafish larvae. In this project, we first perform the rotation manipulation of zebrafish using an acoustically actuated capillary. Then, we would like to realize the precise 3D reconstruction of the in vivo organs of live zebrafish larvae using CV and AI algorithms. We will fabricate a microchannel chip, which can develop a single polarized vortex. By adjusting the acoustic excitation parameters, we will change the rotational speed and direction. Finally, we will program our special 3D reconstruction algorithms and software.
Keywords
3D reconstruction; AI; CV;Rotation; Micromanipulation; Acoustics;
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-20 , Earliest start: 2024-03-01 , Latest end: 2024-08-31
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Ahmed Daniel, Prof.
Topics Information, Computing and Communication Sciences , Engineering and Technology , Biology , Physics
A Fully Integrated Shape-transformable Wearable Ultrasound Helmet

Ultrasound helmets are typically used to focus ultrasound on specific regions of the brain to treat tremors. To date, most ultrasound helmets that have been developed are bulky and rigid, have suboptimal resolution, and produce considerable heat. Ultrasound arrays on flexible sheets offer an exciting new direction, but their application has so far been limited to monitoring. Importantly, no current systems are designed for manipulating microrobots within a 3D vasculature.
Keywords
Wearable, Micro and nanorobots, ultrasound, electronics, brain, acoustics
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2024-02-15 , Earliest start: 2024-02-15 , Latest end: 2024-12-31
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Ahmed Daniel, Prof.
Topics Engineering and Technology
Bioinspired Ultrasound Microrobots

Inspired by naturally-occurring microswimmers such as spermatozoa that exploit the nonslip boundary conditions of a wall, we propose here a microrobot design (a “sperm-bot”) that can execute upstream motility triggered by ultrasound.
Keywords
Robotics, micro and nanorobots, microrobotics, soft robotics ultrasound, bioinspired
Labels
Semester Project , Bachelor Thesis , Master Thesis , Summer School
Description
Goal
Contact Details
More information
Published since: 2024-02-15 , Earliest start: 2024-10-01 , Latest end: 2024-12-19
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Ahmed Daniel, Prof.
Topics Engineering and Technology
Resonant Acoustic Microrobots

The newly designed microrobot consists of a cavity at the center of its body within the polymer matrix. The microcavity supports an air-bubble trap, which enables propulsion in an acoustic field.
Keywords
Keywords: microrobotics, soft swimmers, acoustics, ultrasound, biomedical applications
Labels
Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-15 , Earliest start: 2024-02-15 , Latest end: 2024-12-19
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Ahmed Daniel, Prof.
Topics Engineering and Technology
Activity and fatigue detection using machine learning based on real-world data from smart clothing

The aim of this project is to use machine learning methods to extract useful information such as activity type and fatigue level from real-world data acquired from our textile-based wearable technology during sport activities.
Keywords
smart clothing, wearable technology, textile sensor, fitness tracking, sports medicine, fatigue, machine learning, artificial intelligence, computer science
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-14 , Earliest start: 2023-09-15 , Latest end: 2024-05-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Ahmadizadeh Chakaveh
Topics Information, Computing and Communication Sciences , Engineering and Technology
Develop software for wearable technologies

The aim of this project is to develop mobile software to communicate with our already developed textile-based wearable technology and process sensor data for movement monitoring.
Keywords
smart clothing, wearable technology, software development, fitness tracking, sports medicine, mobile application, computer science
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-14 , Earliest start: 2023-09-15 , Latest end: 2024-05-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Ahmadizadeh Chakaveh
Topics Information, Computing and Communication Sciences , Engineering and Technology
Design data acquisition solution for smart clothing

The aim of this project is to develop and improve wearable electronics solutions for data acquisition from textile-based sensors used in our smart clothing.
Keywords
smart clothing, wearable technology, textile sensor, fitness tracking, sports medicine, PCB, electronics, computer science
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-14 , Earliest start: 2023-09-15 , Latest end: 2024-05-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Ahmadizadeh Chakaveh
Topics Information, Computing and Communication Sciences , Engineering and Technology
Conduct human gait study with optical motion capture to assess smart clothing for movement monitoring

We aim to conduct a study with human participants to assess the function of our textile-based wearable technology for movement monitoring in clinical and fitness scenarios.
Keywords
smart clothing, wearable technology, textile sensor, fitness tracking, sports medicine, rehabilitation, human study, motion capture, computer science
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-14 , Earliest start: 2023-09-15 , Latest end: 2024-05-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Ahmadizadeh Chakaveh
Topics Medical and Health Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Imposition of non-fixed convex constraints on Neural Networks

This project aims to answer the unsolved question of how to guarantee (in a computationally efficient way) hard convex constraints on the output of a network when the parameters that define the constraints change.
Keywords
Neural networks, convex, constraints, hard, optimization
Labels
Semester Project , Collaboration , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2024-02-13 , Earliest start: 2024-02-13 , Latest end: 2025-03-29
Organization Robotic Systems Lab
Hosts Tordesillas Jesus
Topics Mathematical Sciences , Information, Computing and Communication Sciences
Computational Design for Additive Manufacturing (ETH Zurich / TU Delft / Politecnico di Milano Summer School)

APPLICATION CLOSED - 1 – 5 July 2024 - This summer school focuses on computational design which is essential for effectively exploring the large design space and thus reaching the full potential of additive manufacturing.
Keywords
Computational design, additive manufacturing, design for additive manufacturing
Labels
IDEA League Summer School (IDL) , Summer School
Application Deadline
Date(s) of the Event
Description
Location
Costs
Who can apply
Login to SiROP
Required application documents
More information
More information
Published since: 2024-02-13
Applications limited to SiROP Association
Organization IDEA League
Hosts ETH IDEA League , Administrator IDEA League
Topics Engineering and Technology
Establishing Volumetrically Bioprinted Human In Vitro Bone Organoid Models

Laboratory-grown miniature bones (organoids) can facilitate the investigation of the biology in healthy and diseased human bone, thereby replacing animal experiments and providing a mechanistic understanding of bone remodeling. The goal of this research is to establish an in vitro technique for volumetric 3D bioprinting of structurally complex human bone organoids. This bone organoid has the potential to enable studying human bone remodeling in the laboratory without the need for animal models.
Keywords
volumetric bioprinting, hydrogels, bone tissue engineering, bone remodeling
Labels
Semester Project , Internship , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-02-12 , Earliest start: 2024-01-03 , Latest end: 2024-12-23
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts de Bregje
Topics Engineering and Technology , Biology