Characterization and Modeling of Biomaterials for applications in Biohybrid Robotics
Collaborators
PI: Edoardo Mazza
Fellow: Tuba Majid
Collaborators: Jess Snedeker, Lucio Isa, Robert Katzschmann & Simone Schürle
Goals
Biohybrid Robots represents an interdisciplinary field that merges the advantages of living systems with synthetic, engineered materials to create robots for personalized and responsive technology. The macro-scale designs integrate muscle cells or tissue within a biocompatible structure, where the movement is controlled by stimulating the muscle tissue. However, despite the intriguing potential, the proposed designs remain largely in the proof-of-concept phase and not yet suited for application. Furthermore, there is a noted gap in the literature concerning the characterization and computational modeling of biomaterials for biohybrid robots. To address these limitations and provide the fundamental data for design and implementation of biohybrid robots, the goal of this project is to adopt a deterministic approach that systematically identifies key parameters that affect the contractile behavior of the biohybrid, muscular constructs. Through modulation of these parameters - the cell type, environmental conditions influencing growth, and the material properties of the scaffolds, the project seeks to understand the underlying biological and mechanical processes to reliably create biomaterial systems that behave in a predictable and desirable manner.
Methodology
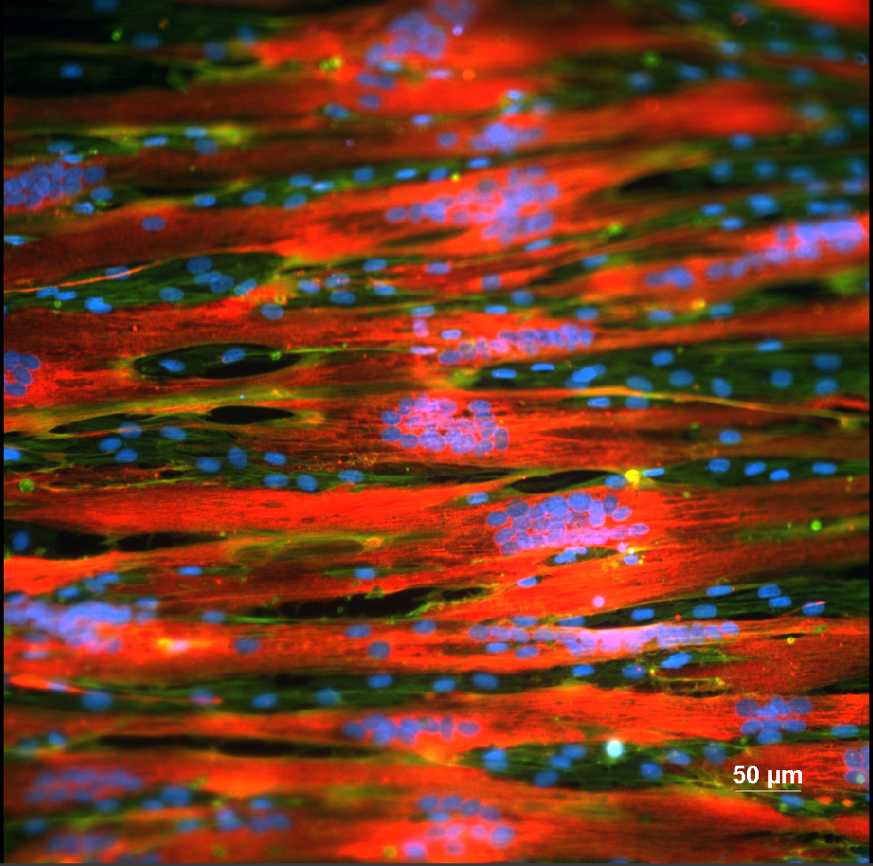
For this project, biomaterial systems will be fabricated in both 2D and 3D configurations. The 2D platform facilitates the visualization and comprehension of myotube (muscle fiber) development and response to stimuli. The optimal results of the 2D configuration will subsequently guide the creation of a 3D configuration that mimics the properties of an actuating muscle. The 2D construct is a bilayer configuration of a tissue-engineered muscle monolayer (active layer) grown over a thin flat sheet of silicone elastomer (passive layer). Microcontact printing with extracellular proteins will be utilized to promote myogenesis. The 3D configuration is a composite material with myotubes aligned anisotopically inside a collagen hydrogel, where the alignment is induced by mechanically controlled morphological cues for cell alignment and growth. The insights from physical experiments will be combined with constitutive modeling techniques to develop a numerical model that represents the active and passive response of biomaterials while addressing the limitations of physical quantification methods, such as force estimation, cyclic and long-term behavior. The outcomes could lead to building bio-actuators with living muscle cells and their application to tissue engineering, targeted drug delivery, environmental monitoring, and soft robotics.